EARSS EVO 2.0EX Steer-by-Wire –
NEXT GENERATON STEERING TECHNOLOGY
Digitally Controlled Mechatronic Steer-by-Wire Force Feedback Device
Designed to operate in harsh environmental conditions – IP67
Functional Safety Performance up to SIL3 →PL e
The aim of Steer-by-Wire technology is to completely eliminate with as many mechanical and hydraulic components (steering shaft, column, gear reduction mechanism, hydraulic pipes in the interior/cabin etc.) as possible. Completely replacing conventional steering system with Steer-by-Wire holds several advantages, like:
– The absence of steering column or oil pipes simplifies the cabin design.
– The absence of steering shaft, column and gear reduction mechanism allows much better space utilization in the engine compartment.
– The steering mechanism can be designed and installed as a modular unit.
– Steering system characteristics can easily and infinitely be adjusted to optimize the steering response and feel.
– Green technology = Power-on-demand
The benefits of applying electronic technology are improved performance, safety and reliability with reduced manufacturing and operating costs. In any case ‘steering feel’ has to be generated artificially in a Steer-by-Wire system because of the “mechanical decoupling” of steering wheel and road wheels.
EARSS EVO 2.0EX Force Feedback Device – Function & Product Description
The SBW Technology EARSS EVO 2.0EX Force Feedback Device is a digitally controlled, backlash-free mechatronic actuator whit a ECU, embedded software and CANBus interface. The actuator generates the steering input function and translates the steering wheel’s rotational movement into redundant digital information on the CANBus. The standard version allows a total angular travel of ± 675 degrees (mechanical end-stops 3.75 turns lock to lock).
The EARSS EVO 2.0EX system is suitable for all Steer-by-Wire applications such as mechatronic, hydraulic or hybrid solutions. The Force Feedback Device is designed to withstand severe operating conditions in harsh environments and provides a sensitive steering feeling and an excellent haptic feedback. The appropriated amount of resistive torque and force feedback on the steering wheel is generated by the integrated electric BLDC motor and is free programmable such as the multiple virtual end stops. Fast response time and no stick slip phenomenon, the very high torque resolution < 0.010Nm (base version) combined with the smooth, low cogging and highly dynamic BLDC motor allows an excellent fine tuning of the device.
The force feedback on the steering wheel can be dynamically adapted in order to suit the different vehicle specific requirements. In the standard version the Force Feedback Device provides mechanical and free programmable (and/or) selectable multiple virtual end stops. For the operator it’s important to sense a feedback that the steered wheels are at their end position (when the steering ratio becomes variable the end stops at the steered wheels will not always result in an mechanical end stop at the steering wheel).
The EARSS EVO 2.0EX software ensures – in interaction with the virtual end stops – that steering wheel position automatically synchronizes with the steering angle on the steered wheels. The free programmable multiple virtual end stops allows the operator to perceive accurately the end position of the steered wheels. The feedback sensor at the steered wheels is used as input to sense the steered wheels reach their end of steering. The virtual end stop is realized by applying the maximum torque on the electric BLDC motor in the steering force feedback actuator.
The steering ratio can easily be changed with a software command and can be adapted in order to make the most comfortable and safe vehicle operating condition available to the operator. The EARSS EVO 2.0EX can interface with other onboard sensors to provide capabilities including stability control, speed sensitive steering, real force feedback and advanced monitoring and control of vehicle dynamics. The control of the real force feedback – torque which impacts on the steering wheel – follows via a dedicated software and complex variation algorithms of the EARSS EVO 2.0EX control electronic. A load cell captures the real forces impacting on the steered wheels or the rudder, the sensor exit signal is transmitted in real time to the ECU and processed by it. Furthermore – in combination with a redundant high resolution GPS receiver – the steering device represents an ideal basis for driverless/autonomous vehicles like agriculture machines, where different vehicle control requirements has to be achieved = on road with operator, off road autonomous.
The actuator provides a self centering function/tendency. This function enables the automatic alignment of the steering wheel and the steered wheels towards the neutral = zero degree steering angle position (behavior well-known from traditional mechanical steering systems, generated by the front axle geometry/castor).
The self centering function/tendency can be deactivated by switch or display – or alternatively – programmed to activate automatically, considering e.g. a certain minimum vehicle or wheel rotational speed. All those advantages translate into reduced operator fatigue, more accurate, safer and better vehicle maneuverability and a measurable productivity improvement.
Approval:
CE Mark – EC Declaration of Conformity (other certifications on request)
According to:
ABYC P-27 ELECTRIC/ELECTRONIC STEERING CONTROL SYSTEMS
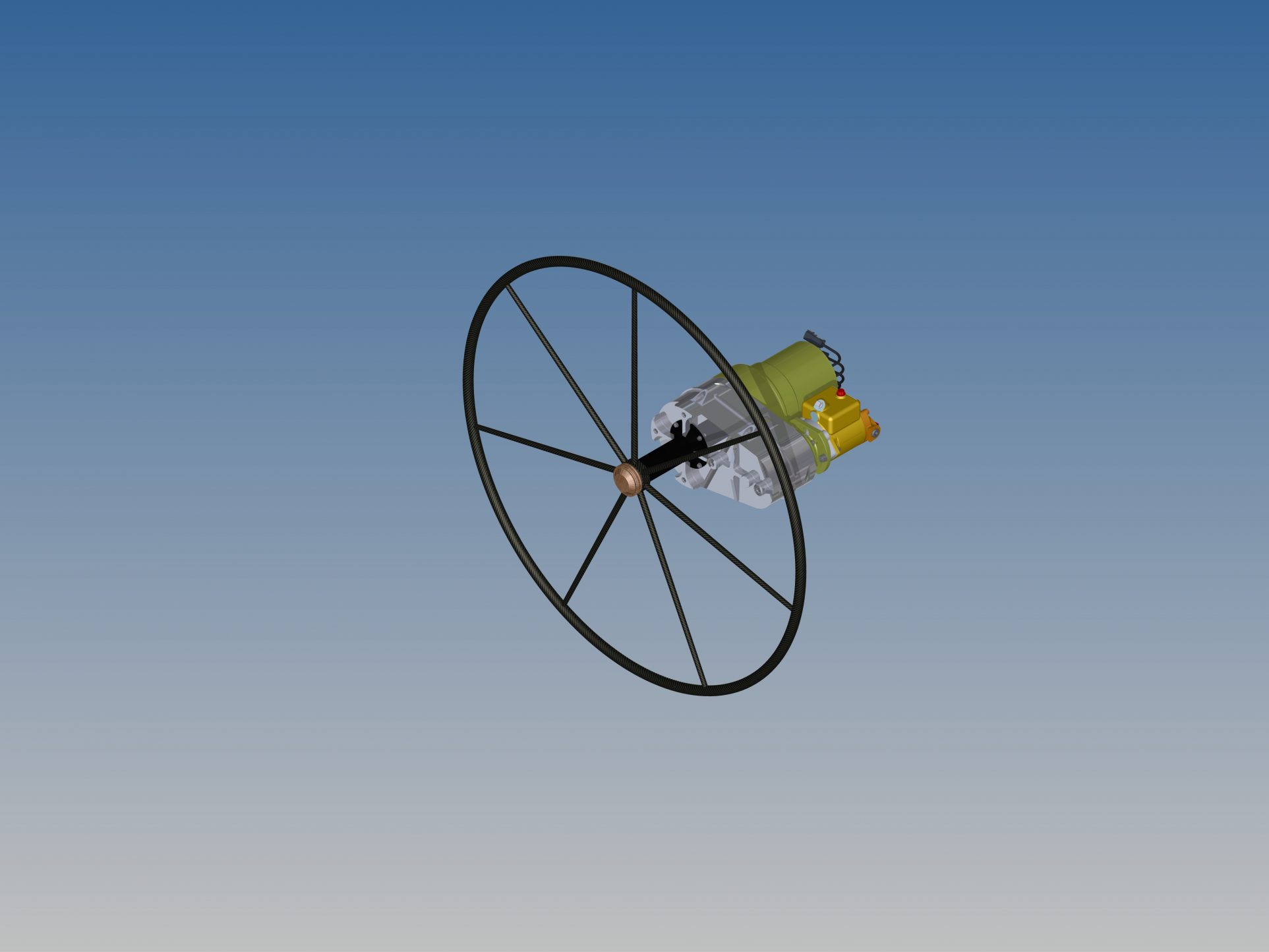
Image showing base version, 3.75 turns lock to lock – Standard shaft





{kind=link}
{kind=link}
{kind=link}
{kind=link}